Woo 等人探索了机器人伙伴系统情感模型的开发[62]。机器人伴侣具有对人类的两种情感结构:共情和机器人情感。首先,共情部分利用基于感知的情感模型,根据感官信息了解人的情感状态; 其次,提出一种循环脉冲神经网络来改进机器人的情感模型,并应用 "Hebbian-LMS"学习来修改脉冲神经网络中的权值。利用人的情感信息、机器人的内部信息和外部信息计算出机器人的情感状态。机器人伙伴可以利用情感结果来控制面部和手势表情。言语风格也会随着机器人的情绪状态而改变。因此,机器人伙伴可以与人类进行情感和自然的互动。
在发展心理学中,intuitive parenting 被认为是一种共情发育方式,当照顾者模仿或夸大孩子的面部表情时,孩子就会在此基础上产生同情心。Watanabe 等人[61]提出,用机器人对人类的 intuitive parenting 进行了建模,该机器人将照顾者模仿或夸张的面部表情与机器人的内部
状态联系起来,以学习同情反应。利用心理学方法定义了人脸内部状态空间和面部表情,并根据外界刺激动态变化。学习完成后,机器人通过观察人的面部表情,对看护者的内部状态做出反应。然后,如果同步引起对看护者内部状态的反应,机器人就会在面部表达自己的内部状态。
Hui 等人提出一个受情感共情的神经机制启发的计算模型--类脑情感共情脉冲神经网络( Brain-Inspired Affective Empathy-Spiking Neural Network, BAE-SNN)[11],该模型包含一个类似于人类情感的机器内部状态变量,并具有类似于大脑的MNS 功能,从而通过镜像机制来理解同伴的情感。用脉冲神经网络复现镜像神经元和反镜像神经元的涌现过程,通过镜像机制对同伴进行情感共情,并具备一定的自我-他人区分能力。
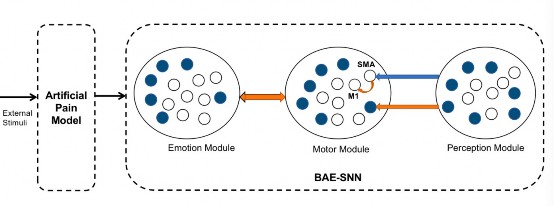
图 5-3 类脑情感共情脉冲神经网络[11]
图 5-3 展示了类脑情感共情脉冲神经网络( Brain-Inspired Affective Empathy-Spiking Neural Network, BAE-SNN)[11]的模型架构。该模型模拟了图 5-3 中提到的共情相关脑区域的功能和连接,其中包括情感模块、运动模块和感知模块。每个模块都是一个神经元群组。情感模块中编码智能体的情感状态。运动模块编码不同的情感外显动作,其中包含镜像神经元和反镜像神经元。因为反镜像神经元是由 SMA 神经元和 M1 神经元组成的,所以在这个神经元群组中设置了一定数量的神经元来模拟 M1 和 SMA 神经元的特性。M1 神经元只
被 SMA 神经元激活,如图 5-3 中橙色的弯曲箭头所示。感知模块编码不同情感外显动作的感知信息。运动模块和情感模块为双向连接,且都是兴奋性连接。从感知模块到运动模块的连接包含对 SMA 神经元的抑制性连接和对其他神经元的兴奋性连接。在图 5-3 中,橙色箭头表示兴奋性连接,蓝色箭头表示抑制性连接。在训练阶段,三个模块之间的联系被建立起来,并产生镜像神经元和反镜像神经元。当感知他人的情感外显动作时,感知信息作为输入将被感知模块编码。然后,它将激活运动模块中的镜像神经元,同时激活相应的情感神经元,实现对他人的情感共情。

生物体的利他行为不是为了得到外部奖赏,如同伴的感激或夸赞等,而是受内在动机驱动。情感共情是激发利他行为决策的重要因素。首先,缓解负面情感是生物体的自发内在动机。当自身负面情感产生时,会指导行为以消除负面情感[83]。在共情过程中,观察者共情到他人的负面情感,自身也产生具身的负面情感体验,会不断指导行为帮助他人,以消除他人的负面情感。
图 5-4 利他行为决策机制[11]
De Waal 等人提出利他行为源自于内在动机,共情是产生这种动机的重要因素[56]。首先情感可以影响生物体行为决策,引导个体避免负面情感(如痛苦和悲伤),这是一种大脑的内在动机。当个体产生负面情感时,会采取适应性行为来消除负面情感,如图 5-4A 的蓝色箭头所示。在观察到他人的负面情感时,情感共情能力可以将他人的负
面情感转移给观察者,如图 5-4B 中橙色箭头所示。这种共享的负面 情感为观察者的利他行为提供了内在动机。为了消除共享的负面情感,观察者会尝试积极地采取利他行为,如帮助、安慰等,如图 5-4B 的 蓝色箭头所示。当他人的负面情感缓解后,观察者共享的负面情感被 情感共情间接消除。因此,利他行为源于内在动机,情感共情可以通 过情感转移来提供这种动机。
类脑情感共情脉冲神经网络模型,包含人工情感的产生和镜像神经系统的复现,且具备一定的自我-他人区分能力。以情感共情作为内在利他驱动力的脉冲神经网络模型,应用于仿真和真实场景的机器人的利他救援任务中,具备情感共情能力的智能体能够共情到其他智能体受到的伤害和困难,主动帮助他人。