5.3 自主车辆驾驶
1. 地面多车智能协同控制系统
为了验证项目在网联式自主驾驶车辆多车智能协同控制系统方面的有效性、鲁棒性和实际驾驶效果,我们选择了项目组研发的东风AX7作为自主驾驶试验平台,并在专用的5G试车场进行实车测试。该自主驾驶平台(东风AX7)具备感知、决策、控制和执行的功能。以下将详细介绍与网联和协同控制相关的软硬件平台。
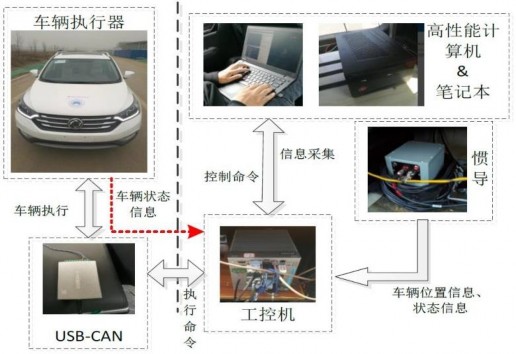
试验平台硬件框图如图5.4所示,涵盖了线控刹车、电动助力转向和电子油门、 USB-CAN接口卡、工控机、惯性导航和高性能笔记本等组件。其中,工控机作为系统执行单元,通过底层驱动程序向车辆发送执行命令,同时采集车辆CAN总线信息并反馈给车辆计算单元。智能车的定位使用了GPS/INS组合定位方式,其中GPS采用司南 GPS定位导航,并引入了RTK(Real-time kinematic)差分技术以提高定位精度。
在测试中,我们针对不同驾驶场景向网联式自主驾驶车辆下发多车智能协同驾驶任务。在结构化路面上,我们测试了多车队形保持策略、多车队形切换策略和编队避障策略。在未知的非结构化道路上,我们测试了自适应策略环境感知部分的功能。在测试过程中,网联式自主驾驶车辆通过车载单元(OBU)持续接收来自中心服务单元
(CSU)和路侧单元(RSU)的道路交通信息,协同驾驶指令可以通过UI人机交互界 面发送到车载单元(OBU),然后编队车辆根据指令通过多车协同驾驶策略进行控制。
在多车智能协同驾驶的控制模型中,智能车辆之间存在相互排斥和吸引的势能作 用,以实现相邻车辆之间的安全保持。实际测试中,东风AX7自主驾驶平台成功实现 了多车队形保持策略,编队车辆的速度稳定,没有出现不稳定的三角结构。在多车队 形切换策略中,车队成功实现了拆分和重组,整个切换过程稳定有效。编队避障策略 中,车辆根据状态变化成功避免了障碍物。从速度-时间曲线可以看出,车辆速度不会 随着虚拟引导车的速度上下波动而产生误差增益,破坏编队的稳定性。在多车队形切 换策略中,智能车辆根据状态变化,实现了车队的拆分重组,整个切换过程稳定有效。编队避障策略由于在变道过程中改变了跟踪目标,每辆智能车对应一个跟踪目标,目 标对智能车产生引导反馈作用,智能车之间的势能作用在车辆到达期望距离后可以忽 略,从而实现汽车的速度与目标车速一致,车队按期望速度协同驾驶前进。
综上所述,项目利用多车智能协同控制技术在实际驾驶环境中验证了东风AX7自主驾驶平台的多车协同驾驶功能。在结构化道路和非结构化道路上,系统成功实现了车辆的编队、切换、避障等多种协同驾驶操作。这些实验结果表明,该项目的多车智能协同控制技术在网联式自主驾驶领域具有良好的应用潜力,在协同控制策略下纵向速度误差保持在10%以内,距离误差不超过5%,横向加速度控制在-0.5~0.5m/s2以内,可以满足中低速的多车编队行驶功能,能够实现车辆之间的安全协同驾驶。
图 5.4 硬件结构框图
系统中利用网联设备对自主驾驶车辆的控制流程分为以下三个步骤:
(1)中心服务单元(CSU)部分:这一部分主要负责道路级路径规划。其目标是借助CSU获取的全局交通流量信息,以选择最短路径来避免拥堵路段。一旦CSU完成规划,它会将信息发送给相应的路侧单元(RSU)。这些RSU根据局部交通情况,进行多车和路口协同,以确保交通畅通和高效。
(2)路侧单元(RSU)部分:RSU在这一流程中扮演关键角色,负责协调多车和路口的交通流。一旦RSU收到CSU的规划信息,它会根据当时的局部交通状况进行调整,以保证交通通畅和高速运行。RSU的任务是优化车辆在路口的通过顺序,最小化等待时间,从而提高整体交通效率。
(3)车载单元(OBU)部分:这是控制流程的最后一步,涉及到车道级的规划和控制。OBU接收RSU提供的车辆通过顺序和CSU的道路级路径规划,基于这些信息进行轨迹规划。主要目标是保障车辆的安全行驶。然后,OBU将最终的轨迹规划传递给车辆平台,通过车辆平台实现车辆的控制。
整个控制流程如图5.5所示,经过这三个步骤,通过网联设备的协同作用,实现对自主驾驶车辆的精确控制和交通优化。
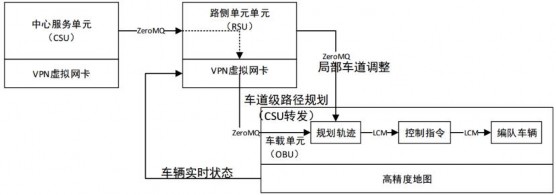
图 5.5 网联式自主驾驶车辆控制流程
在这一网联架构中,CSU 位于云端,类似于整个系统的大脑,扮演着高效的动态 数据库的角色。CSU 的部署位置通常根据网络负载平衡的原则,选择合适的位置,通 常是区域中心。而 RSU 则在整个网联系统中充当信使和执行者的角色。在数据通信方 面,RSU 负责与 OBU 和CSU 模块进行数据交互和信息分享。为了便于网络布局,CSU 和 RSU 通常放在同一个局域网内,通过无线路由器连接。OBU 作为车辆的载体,是整 个系统的终端。它具备一定的感知识别和决策能力,同时也是整个系统指令的接收者。在这一架构中,CSU、RSU 和 OBU 各自由三台工控机来实现。同时,它们还配备了 OCT、UI 和 ETS 三个显示设备,用于信息输出。OBU 包含工控机处理器、传感器、执 行机构和 UI 大屏幕四个部分。RSU 部分主要由工控机和 ETS 平板组成,而 CSU 则由 工控机和 OCT 平板组成。通过外部网络连接,将 CSU、RSU 和 OBU 连接在一起。在 各个模块内部,使用 LCM 接口进行通信,而外部通信则采用 ZeroMQ。整个系统使用 ubuntu 操作系统,核心模块的开发采用 C/C++语言。
表 5.1 试验平台硬件设备
名称 | 型号 | 功能 | |
笔记本电脑 | 3156NGW | 底层控制程序 | |
工控机 | 集智达工控机 NiceE- 6500 | 底层驱动程序、传感算法信息采集 | |
GPS/INS | 迈普时空 MP-POS320 司南 GPS | 定位、车辆姿态 | |
周立功 USB-CAN 接口卡 | USBCAN-1+ | 向动力 CAN 发送执行命令,将车辆信号 CAN 的车 辆状态信息发送至工控机 | |
车内网络设备 | TP-LINK 千兆交换机通 过外网 | 构建车内局域网 | |
无线路由算法 | |||
4G 无线网卡 | 接收 RTK 数据给惯导 |
如图 5.6 所示,演示场地选择在华北地区、华中地区的某试车场内,场景中车道线清晰,有各种上下高速环境的闸道和收费站,拥有结构化道路交通环境,并可进行“高速”、“耐久”和“可靠”等环道测试。场地周围有进行路测的交通调度系统和视频监控系统,为实现完善的网联式自主多车协同驾驶提供了理想的环境。在此环境中,结合上述系统架构及软硬件方案,项目利用三辆东风 AX7 自主驾驶车辆(如图 5.7 所示)模拟多车编队保持、多车队形切换、编队避障及自适应四种协同驾驶场景,并讨论协同控制算法实车测试的效果。


.
图 5.6 测试场地 图 5.7 测试车辆
2. 空地结合智能协同控制系统
空地结合智能协同控制系统实验平台提供了一套完整的集群智能协同控制的研究、
调试和验证环境。该实验系统是基于 ROS/Matlab 开发的,具有强大的开放性。它专注于无人系统的动态建模、控制研究、运动规划、避障控制、多信息融合、编队控制、多智能体协调控制以及无人系统自主控制等技术验证。这为无人系统控制和多机集群控制等教学演示以及二次开发提供了核心设备支持。


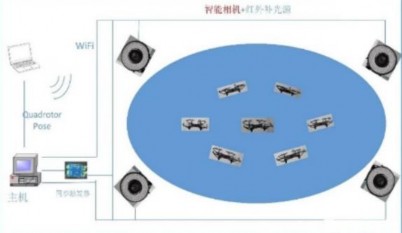
图 5.8 测试机器人集群 图 5.9 测试无人车
该实验平台已经取得了一些关键技术突破,包括 XBEE 分布式网络和 PIXHAWK飞控。成功地嵌入了人工势场法、图论法等编队理论算法。在室内环境下,已经实现了定点、直线、圆等常见编队演示。此外,在飞行过程中,该平台还可以实时地对无人机编队进行队形切换。因此,该平台不仅可以为多无人机飞行过程中的算法提供数据支持,还可以直接用作演示效果的工具。
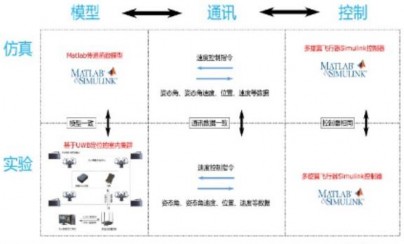
(a) 空地结合多智能体协同控制模型
(b) 空地结合多智能体协同控制示意图图 5.10 空地结合多智能体协同控制示意图
3. 天空地结合智能协同控制系统
天空地跨域多智能体系统是指由在不同空间领域内运行、拥有显著功能差异的运动体所组成的有机整体。在当今多智能体系统领域,这是一个备受关注的研究方向,也是未来跨域多智能体系统应用和技术发展的新趋势。跨域多智能体系统可以通过信息共享与融合、行为交互与协调、任务协同与合作等方式实现功能的互补和效能的增强,从而提升其在面对复杂任务和使命时的应对能力。
在应用方面,天空地跨域多智能体系统的互联与协同合作有助于减少异构平台的功能冗余,最大程度发挥不同平台的系统鲁棒性和能力互补性,实现各要素单元的协同运用,从而实现效果的互通和整体效能的提升。同时,跨域协同也有助于推动新的应用模式在跨域多智能体系统领域的涌现,进一步推动这些系统在各个领域发挥全新的作用。
从技术角度来看,协同是跨域多智能体系统自主性技术的高级阶段。物联网的概念为改变世界带来了巨大的潜力,结合先进的控制和智能决策系统,形成了跨域协同
的技术基础。这种技术与人工智能、信息技术等领域的交叉融合能够显著推动跨域多智能体系统整体技术的发展和提升。
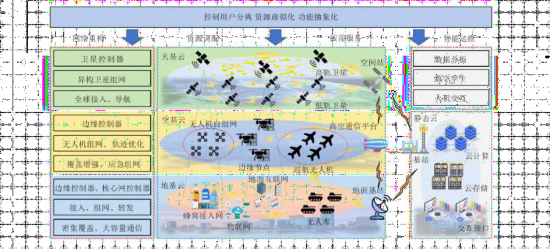
图 5.11 天空地结合智能协同控制系统框图
天空地结合智能协同控制系统是由多种不同类型的运动体,如航天器、空中飞行器和地面移动平台等,组成的异构跨域协同系统。这种系统引入了云控制的理念,其中包括天基云、空基云以及地基云。这些子云控制系统不仅各自构成了一个独立的控制系统,还通过天空地一体化网络实现了彼此之间的互联、互通和互操作。这样的构架建立了一个天空地一体化的跨域协同系统,如图 5.11 所示。
在每个子云控制系统中,通过多种探测设备获得的大量数据在云端进行存储,然后利用数据融合等方法进行在线辨识和建模。基于人工智能技术,实现了整个天空地一体化系统的跨域自主指挥、规划、计划、优化、调度、预测和决策。通过云、网和边的协同作用,结合模型预测控制、数据驱动控制、模型数据混合驱动控制等先进控制方法,实现了整个天空地一体化系统的智能自主协同控制。
这种系统中不同类型的运动体可以在功能和性能上相互补充。例如,由天基系统和空基系统组成的非地基网络能够提供全方位的态势感知和空间覆盖能力,从而辅助地基系统实现全域覆盖和支持。与此同时,地基系统则能够充分发挥其在地面操作方面的高性能优势。这种天空地一体化的跨域协同系统在各种领域中具有重要的应用潜力。