5.4 无人机集群
在无人机集群智能协同控制仿真平台中,无人机集群协同控制模块的作用可以分 为以下几个步骤。首先,该模块起始会将无人机集群的初始信息(包括位置、速度等)传递给无人机飞行动力学模块和无人机集群组网仿真模块。这两个模块分别结合当前
仿真环境的物理特性、气象情况以及模拟的飞行自组网,将无人机模型的状态信息和网络数据传回到集群控制模块。
集群智能协同控制模块随后将收到的物理模型和网络信息作为输入,用于执行集群智能协同控制算法的计算。这些算法基于输入信息,计算出每个无人机在下一个时刻的目标位置和速度等信息。随着仿真的进行,集群智能协同控制模块将计算得到的无人机的下一时刻目标位置和速度信息再次传递给飞行动力学模块和网络仿真模块,以进行相应的模拟。模拟后的数据会继续作为接下来集群智能协同控制模块的输入。
在需要进行无人机网络安全相关仿真时,无人机网络攻击模块会分析传入网络仿 真模块的信息并实施网络攻击。然后网络仿真模块会将攻击后的网络数据传回集群智 能协同控制模块。同时,无人机集群可视化模块会收集网络状态指标、集群智能控制 模块中的协同控制指标等数据,并以动态的方式将整个无人机集群飞行过程展示出来。
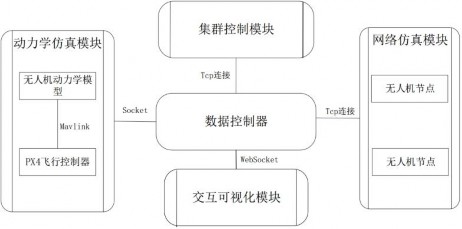
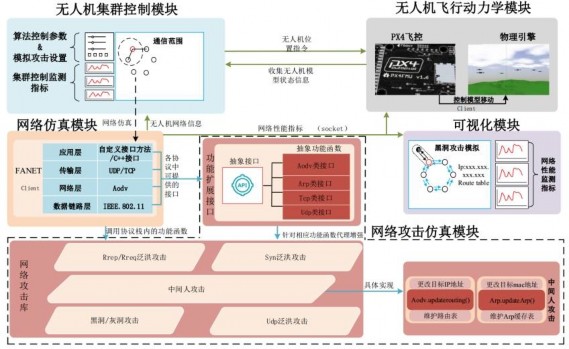
这一系统的架构如图5.12所示,为了更加流畅地描述其机制,上述步骤被更紧密地连接起来。
图 5.12 无人机集群仿真平台整体框架图
在控制层面,基于多智能体框架构建的无人机集群协同控制模型能够有效测试大规模无人机集群协同算法的仿真效果。无人机集群控制算法使得每个个体无人机能够获取协同区域内邻近无人机的信息,并根据周围邻近信息计算下一时刻的飞行策略
(如位置、速度等)。各无人机根据网络拓扑结构进行信息传递。
集群协同控制算法采用智能分布式协同控制方法,即每个无人机只需获取周围邻近无人机的状态信息,然后执行协同控制策略。无人机依据当前的网络拓扑结构,通
过广播方式将自身状态数据发送给邻近无人机。在状态数据传播完成后,集群内的无 人机将更新飞行策略,并根据智能协同控制算法更新当前的飞行策略,从而实现协同 避障、智能编队、目标追踪等功能。协同避障和智能编队利用了Flocking无人机集群智 能协同的原理,个体无人机遵循三个准则:在短距离内相互避让、在局部范围内通过 对齐规则与邻近个体保持速度一致、整个集群保持在有限区域内,即保持编队整体性。目标追踪控制则将无人机集群视为质量分布均匀的整体,利用虚拟代理以质心为中心 向目标点运动。每架无人机的速度模型满足两个条件:(1)接近虚拟代理以加入集群;
(2)通过与虚拟代理速度对齐,跟随集群朝目标点靠近。
整体而言,这个描述更加紧凑,流畅地展示了无人机集群智能协同控制仿真平台 的运行和机制。无人机集群协同控制模块在该平台中扮演着最高控制层的角色。当无 人机集群执行协同任务时,各无人机通过在邻近区域内向周围广播其位置和速度信息,通过无人机自组织网络将广播的信息传递到无人机群组中的各个节点。无人机集群智 能协同控制算法在此基础上进行计算,以在无人机群内形成编队并朝目标位置移动。 无人机集群自组织网络仿真模块和无人机集群协同控制模块的紧密结合在无人机集群 网络化仿真平台中至关重要。为了确保这两个模块的信息交互,数据控制器负责统一 两个模块之间交互的数据格式,并确保在仿真过程中能够同步进行。