5.6 协作机器人
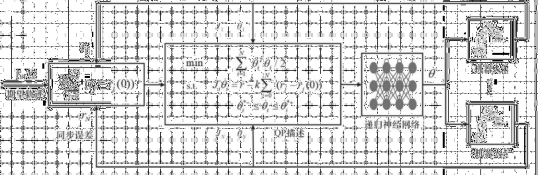
图 5.14 智能协同控制关键技术地面验证平台架构
在工业生产中,多台协作机器人可以通过智能协同控制系统共同完成复杂的组装 和加工任务。每个机器人负责不同的步骤,通过协同控制确保零部件的高精度组装, 提高生产效率和一致性。多机器人协同系统具有负载能力强、工作空间广、灵活性好 等优点,是机器人领域的研究热点。多机器人智能协同控制指通过设计协同控制策略,使多机器人执行共同的任务,在多机搬运、装配、焊接等领域应用广泛。为了解决关 节约束下多机器人任务空间跟踪的智能协同控制问题,以轨迹追踪为主要任务,首先 构建同步跟踪误差并设计外环控制策略,选取关节速度范数最小化为次级任务,进一 步考虑关节速度和关节角限幅,将多机协同运动控制问题建模为一个二次型优化问题,
然后设计一个动态神经网络控制器实时求解控制量,最后建立 MATLAB 与 V-REP 联合仿真实验平台以验证多机协同控制策略的有效性,如图 5.15 所示。
图 5.15 多机器人智能协同控制框图
MATLAB 与 V-REP 联合仿真实验验证了在神经网络协同控制策略的控制下,多机器人系统成功地实现了期望轨迹跟踪,跟踪误差可达到10-4量级,且关节角和关节速度值都在所设置的限幅内。图 5.16(a)所示为三环曲线跟踪过程中 V-REP 环境下截取的跟踪效果,图 5.16(b)所示为最终状态下机器人实现的曲线跟踪结果,可以看到在神经网络协同控制器控制下所有机器人最终都精确实现了期望的三环路径轨迹。
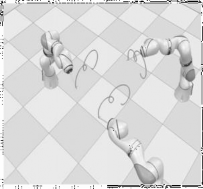
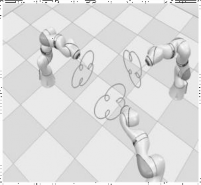
(a)中间状态 (b)最终状态
图 5.16 V-REP 环境下对三环曲线的跟踪效果